gyrotriage — DJIドローン映像のブレを診断し、Gyroflowのパラメータを自動推定するツール
Gyroflowのパラメータ調整に毎回悩んでいませんか。gyrotriageはDJIドローンのMP4ファイルからブレを診断し、Gyroflowの5つのパラメータを自動で推定するCLIツールです。導入方法から使い方、出力の読み方までを解説します。
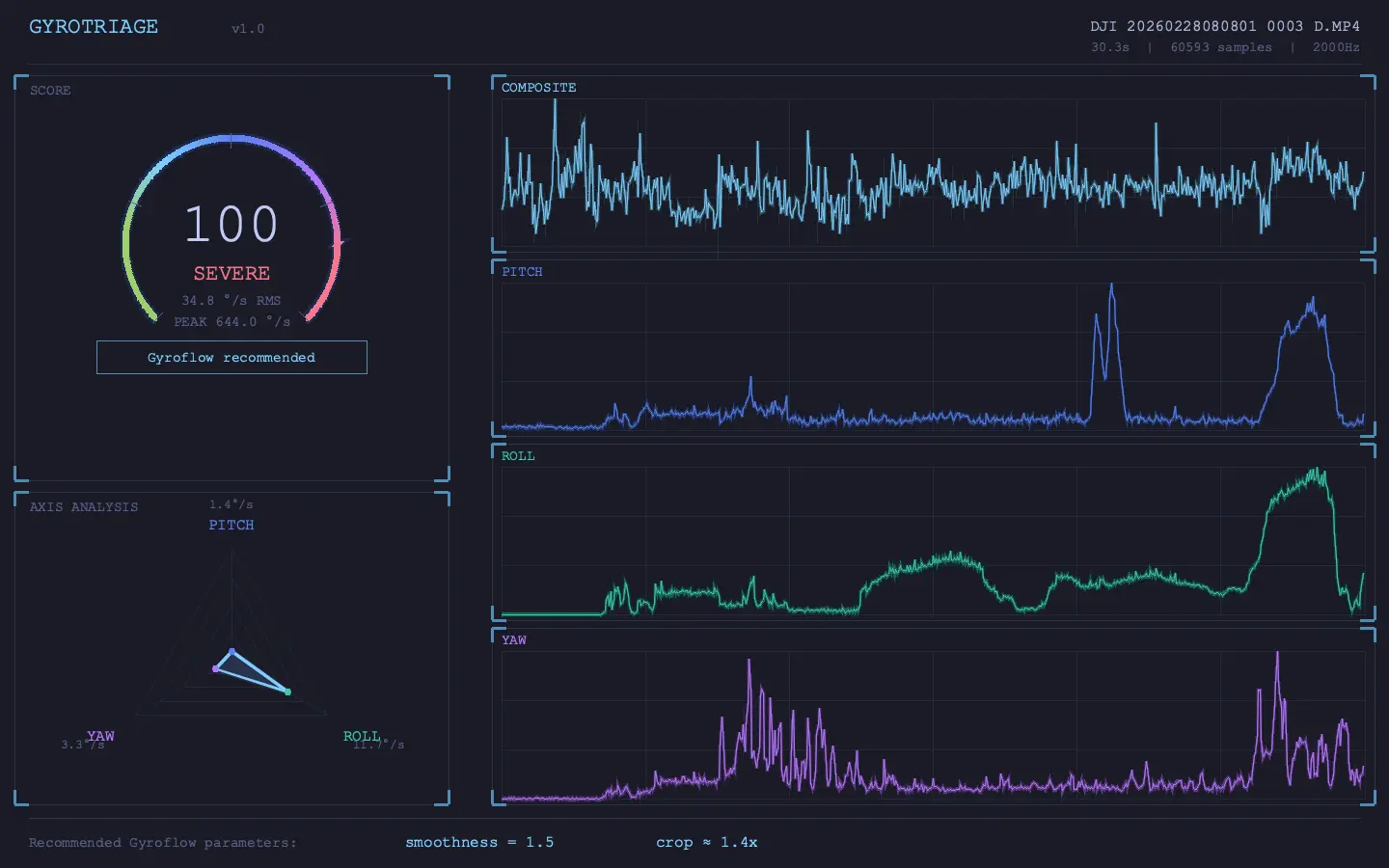
Table of Contents
Gyroflowのパラメータ調整は面倒である
DJI NeoやAvataシリーズでFPV撮影をしている方なら、Gyroflowでの後処理は日常的な作業だと思います。EISをオフにして撮影し、Gyroflowでスタビライズする。この流れ自体は確立されていますが、問題はGyroflowのパラメータ調整です。
Gyroflowには主に5つの調整パラメータがあります。
| パラメータ | 意味 |
|---|---|
| Smoothness (%) | スムージングの基本強度。高いほどブレを強く除去するが、意図した動きも鈍る |
| Max smoothness (s) | 突発的なブレに対する最大補正量 |
| Max smoothness at high velocity (s) | 高速旋回時の補正上限。短くすると旋回への追従性が上がる |
| Zoom limit (%) | 安定化で生じる黒縁を隠すためのズーム上限 |
| Zooming speed (s) | Dynamic zoomingのFOV遷移速度 |
強く設定すればブレは消えますが、意図したカメラワークまで平滑化されたり、クロップで解像度が落ちたりします。適切な値はクリップごとに異なるため、毎回プレビューを見ながら試行錯誤することになります。
1本2本ならまだしも、フライト後に何十本ものクリップを処理するときは正直つらい作業です。
gyrotriageでパラメータ推定を自動化する
そこで作ったのが gyrotriage です。DJIドローンのMP4ファイルを渡すだけで、埋め込まれたモーションデータを解析し、ブレの度合いをスコアリングしつつ、Gyroflowの5つのパラメータを自動で推定します。
考え方はシンプルです。パイロットが意図したカメラワーク(パン・チルト・旋回)と除去したいブレ(風や機体振動)では、動きの周波数帯域が異なります。ゆっくりしたパンは1Hz以下の低周波、プロペラ振動は20Hz以上の高周波に現れます。この境界を信号処理で自動検出し、Gyroflowの内部ロジックに合わせてパラメータに変換しています。
インストール
macOSの場合はHomebrewでインストールできます。
brew install gyrotriageRustの開発環境がある場合はcargoからもインストールできます。
cargo install --path .使い方
基本的な使い方はMP4ファイルを渡すだけです。
gyrotriage DJI_0001.MP4以下のようなテキスト出力が得られます。
File: DJI_20260228080801_0003_D.MP4
Duration: 30.3s (60593 samples @ 2000Hz)
Score: 100 / 100
Level: SEVERE
RMS: 34.8 °/s
Peak: 644.0 °/s
Pitch: avg=1.4°/s std=2.2°/s max=47.9°/s
Roll: avg=11.7°/s std=13.5°/s max=251.1°/s
Yaw: avg=3.3°/s std=4.4°/s max=89.0°/s
---
Gyroflow: smoothness=21% max=0.300s max@hv=0.030s
zoom_limit=118% zooming_speed=2.6s最後の2行がGyroflowに入力する推定パラメータです。この値をGyroflowにそのまま入力すれば、そこから微調整を始められます。
HUD表示で直感的にブレを把握する
--visual オプションを付けると、ブレの特性をHUD風のグラフィックで表示します。
gyrotriage DJI_0001.MP4 --visual冒頭のカバー画像がHUD出力の実例です。画面には以下の情報が表示されます。
- スコアゲージ: ブレの重大度を0〜100で表示(STABLE / MILD / MODERATE / SEVEREの4段階)
- レーダーチャート: Pitch・Roll・Yawの3軸でブレの偏りを可視化
- ライングラフ: 合成角速度と各軸の角速度の時系列変化
- 推定パラメータ: Gyroflowに入力する5つの値
数値だけでは分かりにくい「このクリップはRoll方向のブレが支配的」「後半に激しいブレが集中している」といった特性が一目で把握できます。Gyroflowを開く前に、どのクリップにどの程度の処理が必要かをトリアージするのに役立ちます。
HUD画像はPNGファイルとしても出力できます。
gyrotriage DJI_0001.MP4 --output-image shake.pngWezTermやiTerm2などSixel/iTerm2プロトコルに対応したターミナルでは --visual でインライン表示されます。非対応のターミナルでは --output-image でファイル出力してください。
テキストのみの環境向けには --sparkline オプションもあります。
gyrotriage DJI_0001.MP4 --sparklineスコアの読み方
gyrotriageはブレの重大度を0〜100のスコアで表示します。
| レベル | スコア | 目安 |
|---|---|---|
| STABLE | 0〜25 | ブレはほぼなし。スタビライズ不要 |
| MILD | 26〜50 | 軽微なブレ。スタビライズは任意 |
| MODERATE | 51〜75 | 目に見えるブレ。Gyroflow推奨 |
| SEVERE | 76〜100 | 激しいブレ。Gyroflow必須 |
DJI Air 3Sのような3軸ジンバル搭載機ではほぼSTABLEになりますが、DJI Neoのような1軸ジンバル機やAvataシリーズでアクロバティックな飛行をした場合はMODERATE〜SEVEREになることが多いです。
推定パラメータの使い方
出力された5つのパラメータはGyroflowのUIに直接入力できます。
- Gyroflowでクリップを開く
- 出力された値をそれぞれのスライダーに入力する
- プレビューで確認し、必要に応じて微調整する
推定値はあくまで調整の出発点です。ブレが残っている場合はSmoothnessを上げる、カメラワークが鈍く感じる場合はSmoothnessを下げる、といった微調整で仕上げてください。ゼロからスライダーを動かして探るよりも、妥当な出発点があるだけで調整時間は大幅に短縮できます。
対応機体と撮影条件
モーションデータがMP4へ埋め込まれるDJI機種に対応しています。ただし撮影時の設定次第ではモーションデータが記録されないため、注意が必要です。
| 機体 | 条件 |
|---|---|
| DJI Avata / Avata 2 | EIS(Rocksteady)オフ、FOV Wide |
| DJI Neo / Neo2 | アスペクト比4:3(EISは自動的にオフ) |
Avataシリーズの場合、Rocksteadyをオンにしているとモーションデータが記録されません。Gyroflowで後処理する前提なら、撮影時はRocksteadyオフ・FOV Wideで撮影してください。
DJI Neoの場合、16:9で撮影するとモーションデータが記録されません。4:3で撮影する必要があります。
DJI Air 3Sなど3軸ジンバル搭載機はGyroflow自体を必要としないケースが多く、対象外としています。
実際の効果
gyrotriageで推定したパラメータを微調整なしでそのままGyroflowに適用した映像(右)と、オリジナルの未処理映像(左)の比較です。
注意事項
- 推定値は信号処理に基づく客観的な算出であり、映像の主観的な品質評価は含まない
- 非常にゆっくりしたブレ(0.3Hz未満)は意図した動きと区別できない
- GyroflowのDefaultアルゴリズムを前提としており、Plain 3Dや軸別モードでは推定値の解釈が異なる
- 極端に短いクリップ(2秒未満)では推定精度が低下する
- 商用空撮など業務用途では、必ずGyroflowのプレビューで結果を検証すること
- Gyroflow. 「Gyroflow - Video stabilization using gyroscope data」